เมื่อหลาย ๆ ๆ ปีก่อน ผมเคยชวนเพื่อนให้ทำหุ่นยนต์สังเกตการณ์ แบบว่าให้หุ่นยนต์จับภาพวัตถุเป้าหมาย แล้วส่งข้อมูลภาพในรูปแบบโครงร่างผ่านคลื่นวิทยุมายังคอมพิวเตอร์ จากนั้นให้คอมพิวเตอร์แสดงภาพโครงร่างที่หุ่นยนต์จับภาพได้ออกมา โดยผมขอให้เพื่อนรับผิดชอบการทำวงจร (เพราะมันเก่งไฟฟ้า) ส่วนผมจะรับผิดชอบการเขียนโปรแกรมเพื่อแสดงภาพสามมิติเอง!!!
ผลปรากฎว่าเพื่อนผมเขาไม่เอาด้วย เขาบอกว่ามันยาก เพราะเขาไม่สามารถคำนวณวงจรให้มีขนาดเล็กกะทัดรัดได้ เขาบอกว่าวงจรไฟฟ้าที่ดีจะต้องกินไฟฟ้าน้อยและเล็กกะทัดรัด (คงเหมือนกับการเขียนโปรแกรมที่ดี ที่จะต้องสั้นที่สุดแต่มีพลานุภาพมากที่สุด)
ดังนั้น จินตนาการอันนี้ก็เลยตกไป!!!
พอมาถึงตอนนี้ กลายเป็นว่าสิ่งประดิษฐ์ในย่อหน้าข้างบนที่เคยคิดจะทำ มันเริ่มออกมาโลดแล่นในโลกมายาและโลกแห่งความเป็นจริงมากขึ้นเรื่อย ๆ จนมันมีความเป็นไปได้ที่จะจัดซื้อจัดหามาได้โดยง่าย อีกทั้งมันยังมีมาตรฐานในการเชื่อมต่อที่ไม่เป็นแบบระบบปิดอีกต่อไป!!!
ก็เลยเกิดจินตนาการขึ้นมาใหม่ตามภาพข้างล่างนี้
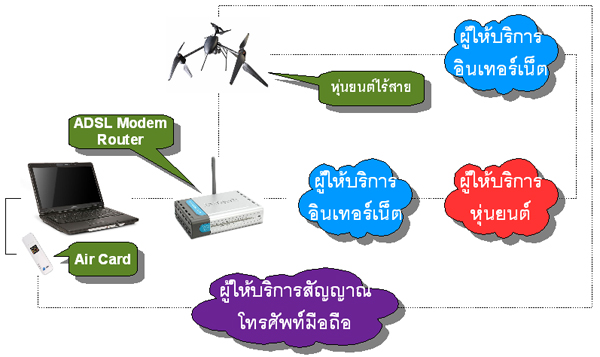
จากภาพข้างบนจะเห็นว่า เราสามารถควบคุมหุ่นยนต์สังเกตการณ์ของเราได้ 3 ทิศทาง อันได้แก่
- ผ่านทางระบบ LAN โดยใช้ Wireless Router เป็นตัวสื่อสารระหว่างหุ่นยนต์กับคอมพิวเตอร์ของเรา
- ผ่านทางระบบอินเทอร์เน็ต โดยให้ “ผู้ให้บริการหุ่นยนต์” เป็นตัวกลางเพื่อบริหารจัดการหุ่นยนต์ให้กับเรา
- ผ่านทางระบบสัญญาณโทรศัพท์มือถือ โดยใช้ Air Card ซึ่งเสียบ SIM ของบริษัทสัมปทานสัญญาณมือถือต่าง ๆ (ในประเทศไทย) เพื่อเอาไว้ต่อเชื่อมกับหุ่นยนต์ของเรา
ไม่แน่ใจว่าแบบที่ 2 หรือแบบที่ 3 ที่จะต้องใช้เทคโนโลยีในการจัดสร้างยุ่งยากกว่ากัน???
แต่ที่รู้แน่ ๆ ก็คืิอ ขอให้มันจริง ๆ เถอะเจ้าประคู้น เพี้ยง ๆ 😛
[tags]หุ่นยนต์, ไร้สาย[/tags]

แบบที่ 1 ปัจจุบันก็เป็นแบบนี้แหละ
แบบที่ 2 ผ่านทางระบบอินเตอร์เน็ต โดยให้ ผู้ให้บริการหุ่นยนต์
แล้วทำไมต้องผ่านผู้ให้บริการหุ่นยนต์อีกล่ะ งี้แสดงว่าเราใช้หุ่นยนต์
ที่พัฒนามาจากบริษัทนั้นซินะ พี่แกฟันสองต่อเลยดิ
แบบที่ 3 ผ่านทางระบบสัญญาณโทรศัพท์มือถือ ก็คงหนีไม่พ้น GPRS หรือไม่ก็ Edge แบบนี้เกิดยาก ค่า GPRS บ้านเราโหดชิหาy
ส่วนตัว คิดว่าระบบอินเตอร์เน็ตแบบเดิมก็พอแล้วนะ
คงไม่ถึงกับมีผู้ให้บริการหุ่นยนต์
แต่อนาคตผมอยากให้มี Protocol สำหรับหุ่นยนต์
เหมือนพอร์ต 80 เป็น HTTP
พอร์ต 1200 เป็น Robot Command
พอร์ต 1300 เป็น Robot Data
แต่ที่แน่ๆ มันคงจะโดนแฮกอีก
edit. เว็บพี่ไท้ แสดงความคิดเห็นด้วย Google Crome ไม่ได้แฮะ
ตรงฟอร์มกรอกใส่ชื่อ อีเมล์ มันมั่วไปหมด
มันมั่วทุก Browser แหล่ะคุณ PGiZ เพราะว่า CSS มันรวน (ถ้าไม่เตือน ผมก็ไม่เห็นเหมือนกัน T-T) ซึ่งผมก็ได้ทำ workaround ไปเรียบร้อยแล้ว โดยการให้มันเลิก “FLOAT” ส่วนของ LABEL ซะเลย
เท่าที่ผมดูนะครับ ประเด็นสำคัญคือ จะสื่อสารกับหุ่นยนต์ได้ยังไง ซึ่ง
1. แบบนี้ดูจะเวิร์คสุดครับ แต่มีข้อจำกัดเรื่องระยะทางของกำลังส่งไวเลสแน่นอน แต่ถ้าใช้เสา outdoor ที่กำลังส่งสูงๆ ก็น่าจะพอทำได้
2. ถึงจะให้ ISP จัดการแทนเรา แต่ปัญหาว่าจะติดต่อกับหุ่นยนต์ยังไง ยังไงก็ไม่พ้น wireless ในข้อแรก
3. ถ้าแบบที่สามนี้ Air Card จะต้องไปอยู่ที่หุ่นยนต์ครับ แล้วเราค่อย Control ผ่านเน็ต เพราะ Air card มีไว้แค่ให้ access ถึงเน็ตได้ครับ แต่ถ้ามองว่าเราจะเอาโน็ตบุคเคลื่อนที่ไปควบคุมหุ่นยนต์ใกล้ๆด้วย ก็ต้องใช้ Air card ทั้งสองครับ
ถ้าจะทำจริงๆ ปรึกษาได้นะครับ น่าสนใจดีเหมือนกัน เพื่อนผมเห็นแล้วคงชอบเลย มันชอบทำหุ่นยนต์กัน แต่ผมทำไม่เป็นนะ พอดีเปลี่ยนสาย อิอิ
ใช้การ remote desktop เข้าไปที่ notbook ที่มี port ขนาน(พ๊อทปริ้นเตอร์สมัยเก่า) ซึ่งฝั่งของ notbook เราจะให้เป็นหุ่นย์ ซึ่งจะมีโปรแกรมควบคุมอุปกรณ์ภายนอกผ่าน port ขนาดได้ โดยใช้ภาษา vb.6 ในการเขียนควบคุมได้ โดยต้องใชัร่วมกับ input32.dll ด้วย ผมทดลองทำอยู่เหมือนกัน
ปัญหามันติดอยู่ตรงที่ เราจะ remote notbook ของเราผ่านอินเตอร์เน็ตได้ต้องทำให้เร้าเตอร์อีกฝั่งมี ip ที่ไม่เปลี่ยนแปลงไป